
Ersatzteil-Finder
KBA-Nummer
Manuelle Fahrzeugidentifikation
OE-Nr.
Der Beladungszustand und die Nickbewegungen des Fahrezugs verändern die Leuchtweite der Scheinwerfer. Andere Verkehrsteilnehmer können dadurch geblendet werden. Deshalb sind Systeme zur Leuchtweitenregulierung (LWR) gesetzlich vorgeschrieben. Entdecken Sie auf dieser Seite, wie die marktüblichen Systeme funktionieren und wie man sie mit einfachen Mitteln prüfen kann. Außerdem erfahren Sie hier, was im Störfall zu tun und bei der Einstellung von Scheinwerfern mit automatischer LWR zu beachten ist.
Diese LWR-Systeme erfüllen ihre Aufgabe ohne Aktivität des Fahrers. Man unterscheidet zwei Systeme: die quasistatische und die dynamische LWR.
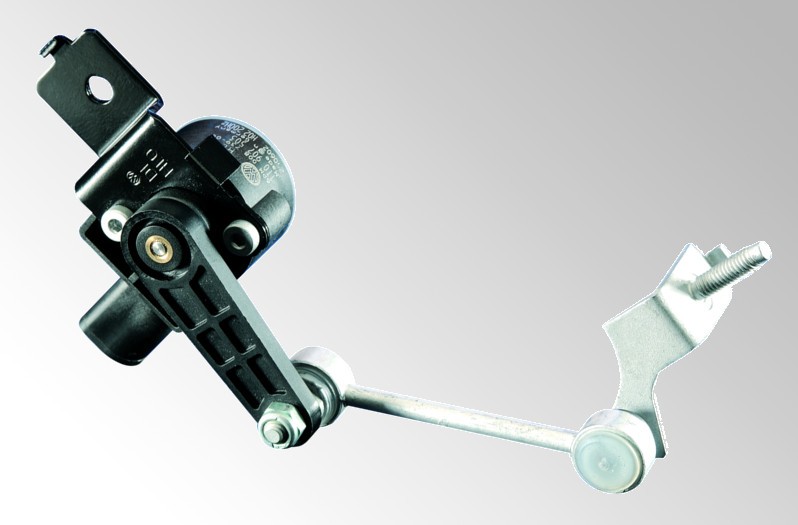
In der Regel werden auch die gleichen Stellmotoren wie bei der manuellen LWR verbaut. Bei kompakten Fahrzeugen ohne lange Radüberstände bietet diese Anlage die Möglichkeit, auf den vorderen Achssensor zu verzichten, da die Neigungsänderungen zum großen Teil nur an der Hinterachse auftreten. Die quasistatische LWR arbeitet außerdem mit großer Dämpfung, d. h., sie regelt nur lang anhaltende Karosserieneigungen aus. Bei Xenon-Umrüst-Sets von HELLA kommt ein System auf Ultraschallbasis zum Einsatz. Hierbei misst der Sensor den direkten Abstand zur Fahrbahn.
Das Blockschaltbild zeigt den Aufbau einer dynamischen LWR. Das Steuergerät berechnet hierbei aus den Sensordaten unter Berücksichtigung des Fahrzustands die Solldaten. Im Gegensatz zu der quasistatischen LWR werden dann die Stellmotoren in Bruchteilen einer Sekunde angesteuert. Um diese schnellen Reaktionszeiten zu ermöglichen, werden hauptsächlich Schrittmotoren als Stellglieder an den Scheinwerfern eingesetzt.