



Recherche de pièces de rechange
Référence OE
Identification manuelle des véhicules
Pièces universelles
L'état de chargement et les mouvement de tangage du véhicule modifient la portée lumineuse des projecteurs, ce qui risque d'éblouir les autres usagers de la circulation. Les systèmes de correction de portée lumineuse sont donc prescrits par la loi. Découvrez sur cette page comment fonctionnent les systèmes courants sur le marché et comment les vérifier avec des moyens simples. Vous apprendrez également ce qu'il faut faire en cas de défaillance et lors du réglage des projecteurs avec correction de portée lumineuse automatique.
Ces systèmes de correction de portée lumineuse remplissent leur fonction sans que le conducteur ait à agir. On distingue deux systèmes : la correction de portée lumineuse quasi statique et la correction dynamique.
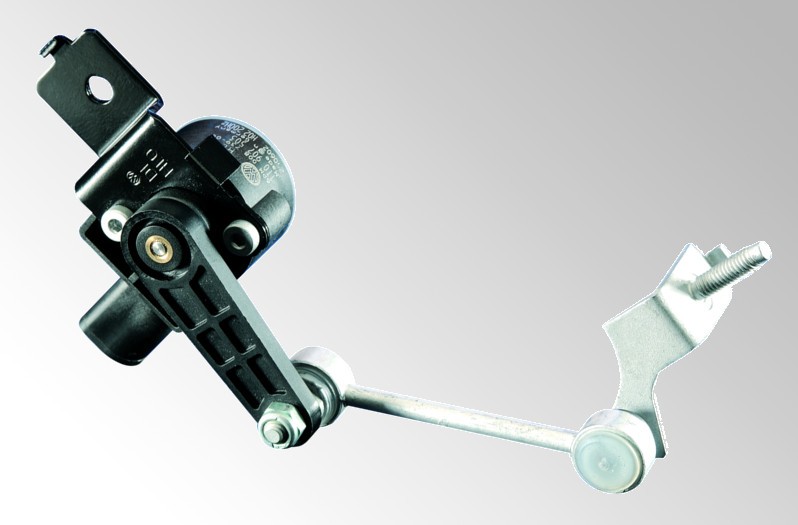
En règle générale, les mêmes servomoteurs que ceux utilisés avec la correction manuelle sont montés. Sur les véhicules compacts où le « dépassement latéral » des roues n'est pas excessif, ce dispositif offre la possibilité de renoncer au capteur de train AV étant donné que les changements d'inclinaison ne se produisent en majeure partie que sur le train AR. La correction de portée lumineuse quasi statique fonctionne en outre avec un grand amortissement : elle ne régule que les inclinaisons de caisse de longue durée. Dans les kits de post-équipement « xénon » de HELLA, un système à base d'ultrasons est utilisé. Le capteur mesure alors l'écart direct par rapport à la chaussée.
Le schéma fonctionnel montre la structure d’un système de correction dynamique. Le calculateur traite les données théoriques à partir des données de capteurs, en tenant compte des conditions de roulage. Contrairement à la correction de portée lumineuse quasi statique, les servomoteurs sont ensuite activés en fractions de seconde. Pour obtenir ces temps de réaction rapides, on utilise principalement des moteurs pas-à-pas comme actionneurs des projecteurs.


