Control units
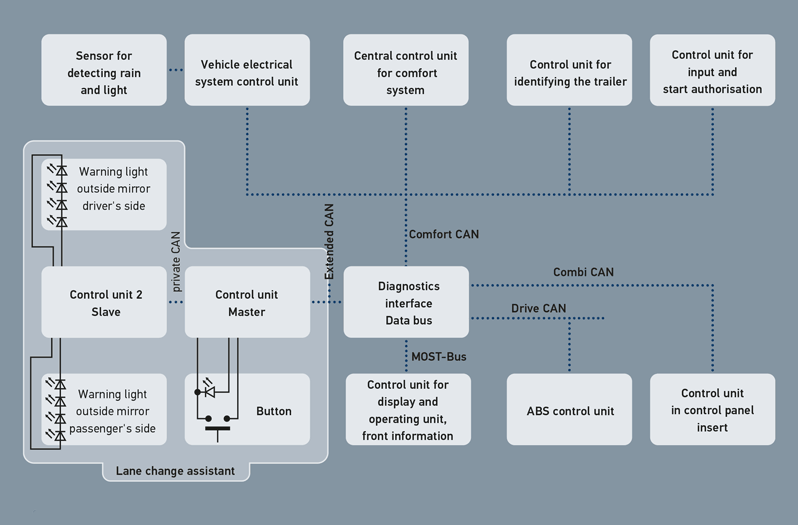
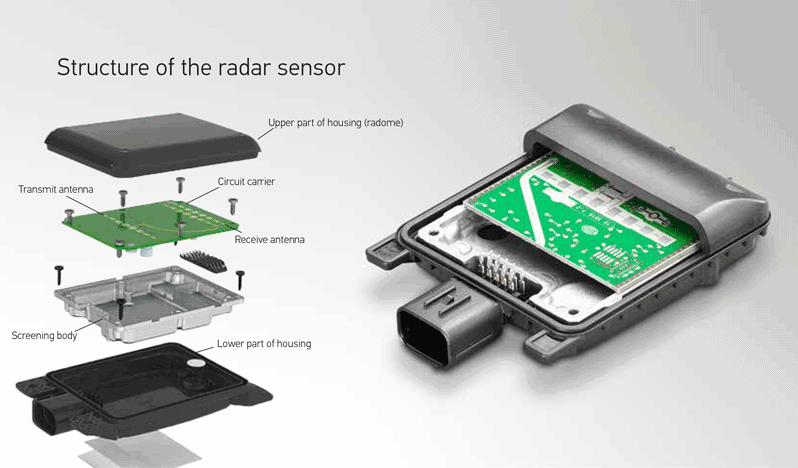
The lane change assistant system consists of a master and a slave control unit with identical structures. Together with an integrated radar sensor, the two control units produce one standalone component. Above the radar sensor, the control unit is fitted with a plastic cover. This cover, also known as a "radome", is made from a special material, through which radar beams can pass perfectly.
The "master" control unit (1) is fitted behind the bumper on the left and the "slave" control unit (2) is fitted behind the bumper on the right.